
전남대 손형일 교수팀, ‘과채류 수확용 로봇’ 국제학회 수상
로봇분야 세계적 권위 학회
‘Best Paper Award’ 수상
‘Best Paper Award’ 수상
작성 : 2023년 06월 13일(화) 23:06 가+가-
 |
손형일 교수, 조유성 석사 과정생, 박용현 박사과정생이 참여한 연구팀이 개발한 ‘그리퍼’는 오이, 토마토, 파프리카 등의 과채류 수확용 로봇을 위한 소프트 로봇이다.
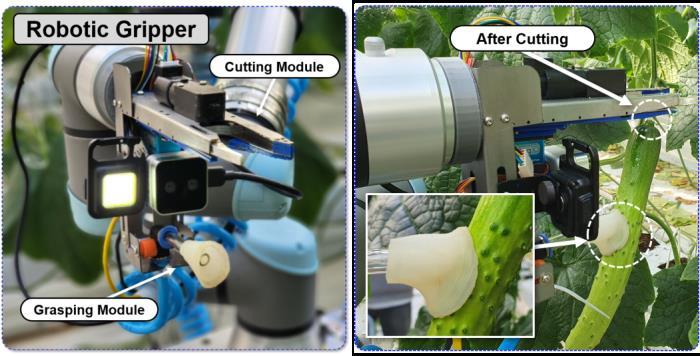
로봇 그리퍼는 파지 모듈(grasping module)과 절단 모듈(cutting module)로 구성돼 있다. 제시한 파지 모듈은 종이접기 구조에 착안해 다양한 과채류 표면의 거칠기, 굴곡, 곡률 등에 상관없이 수확할 과채류를 손상 없이 흡착할 수 있는 석션컵 설계 기술이 핵심이다. 그리고 절단 모듈은 과채류의 꼭지를 절단하기 쉽게 절단부 방향으로 수확하는 한편, 꼭지의 강도에 상관없이 고속 절단할 수 있는 절단부 제어가 핵심 기술이다.
해당 연구 결과는 시설재배 오이 수확용 로봇에 적용 후 현장 실증해 수확 성공률 86.2%로 매우 우수한 결과를 보였다. 연구팀은 개발한 소프트 로봇 그리퍼를 수경재배 참외 수확용 로봇에 적용하기 위해 파지 모듈의 가반하중(payload) 향상과 절단 모듈 소형화 등에 관한 후속 연구를 수행하고 있다.
한편, 이번 연구는 한국연구재단 중견연구지원사업, 스마트팜 다부처 패키지혁신기술개발사업, BK21 4단계 IT-Bio융합시스템농업교육연구단 등의 지원으로 수행됐다.
tok6577@naver.com
최신뉴스더보기

- 광주광역시 경제정책협력관에 박충원 한은 부국장
- [톡톡뉴스]광주광역시는 9일 경제정책협력관으로 박충원 한국은행 부국장(2급)을 위촉했다. 박 신임 경제…

- 화순고려병원 이영민 원장, 전남대병원에 발전후원금 1000만원 기탁
- [톡톡뉴스] 전라남도 화순군의 지역의료 최일선에서 헌신하며 지역민의 건강 증진을 위해 힘쓰고 있는 화순고려병…

- '건설업계 큰별' 중흥그룹 창업주, 정창선 회장 별세
- [톡톡뉴스] 중흥그룹 창업주 정창선 회장이 지난 2일 오후 11시 40분, 광주 전남대학교병원 학동병원에서 …

- 김영록 전라남도지사, 고 김창식 지사 영면 기원
- [톡톡뉴스]김영록 전라남도지사는 지난 2일 향년 97세로 소천한 김창식 전 전남도지사의 영면을 기원하면서, …

- 적십자사 광주·전남혈액원, 벌교여고 정홍윤 교장 '헌혈홍보위원 위촉'
- [톡톡뉴스] 대한적십자사 광주·전남혈액원(원장 박진성)은 22일 전남 보성 벌교여자고등학교 정홍윤 교장을 광…

- 전남대 김민자 입학사정관, 한국대학입학사정관협의회장에
- [톡톡뉴스]전남대학교 입학처 김민자 입학사정관이 한국대학입학사정관협의회 제16대 회장으로 선출됐다. …

- 광주광역시 금융정책협력관에 이수인 금감원 국장
- [톡톡뉴스]광주광역시는 14일 금융정책협력관으로 이수인 금융감독원 국장을 위촉했다. 이수인 신임 금융협…

- 윤홍근 회장 ‘자강불식’ 경영 철학 실천, 모교 조선대에 10억 기부
- [톡톡뉴스] 국내 대표 외식 프랜차이즈 기업 제너시스BBQ 그룹 윤홍근 회장이 조선대학교에 발전기금 10억 …

- 조선대학교 미술관, ‘공립미술관’으로서 문화예술 허브로 도약
- [톡톡뉴스] 조선대학교 미술관(관장 김일태)이 교육 중심 공립미술관의 정체성을 강화하고, 국제 교류와 글로컬…

- 목포대 체육학과 이서우 강사,‘2026 UCWDC 세계선수권대회’클래식 라인댄스 월드 챔피언 등극
- [톡톡뉴스] 국립목포대학교(총장 송하철) 체육학과 이서우 강사가 2025년 12월 28일부터 2026년 1월…
Copyright © 2016 뉴스톡톡. All Rights Reserverd.